Smart Bin Picking Automation for Modern Production Processes
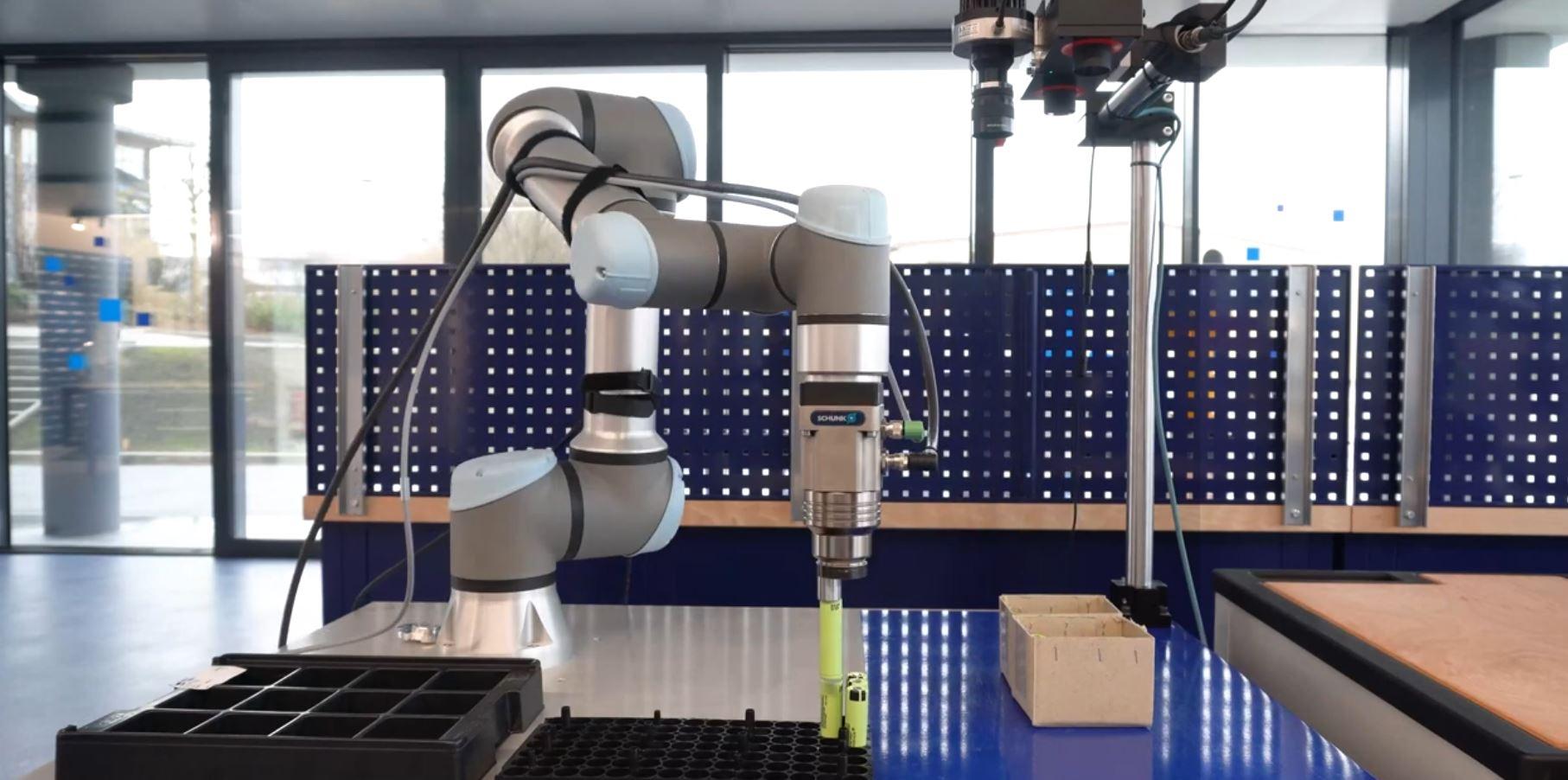
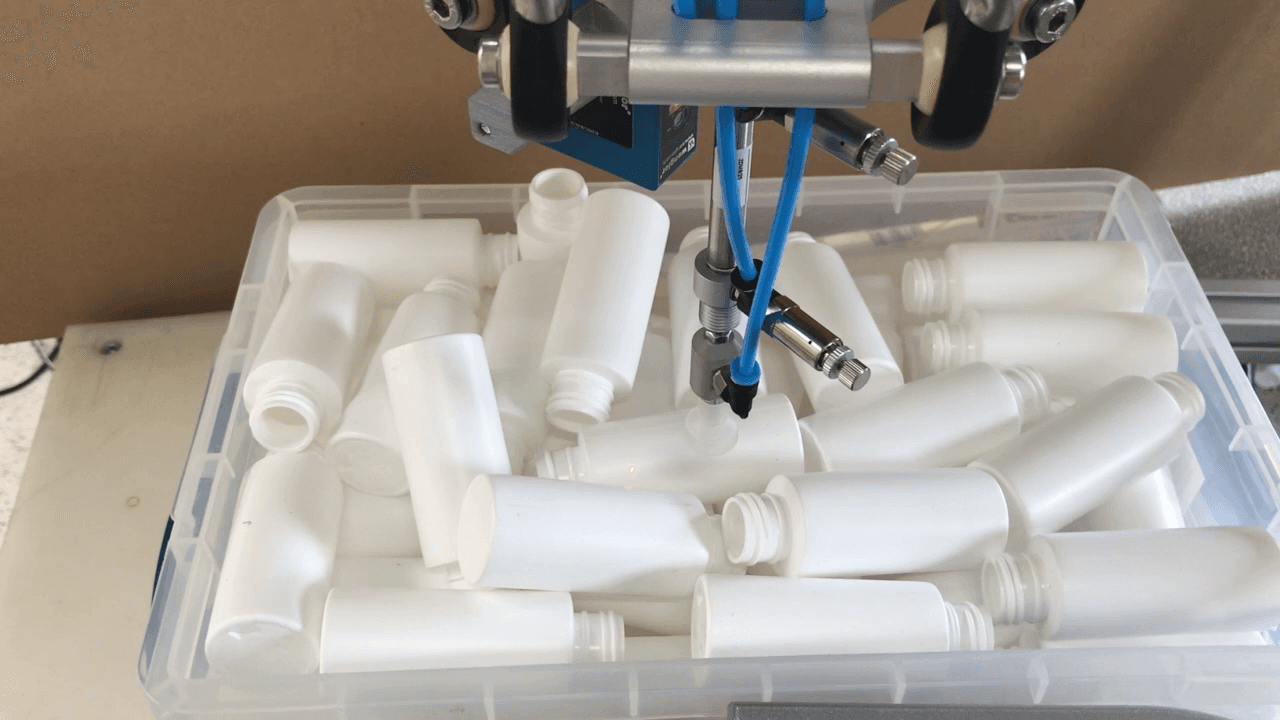
In many production and logistics processes, removing unsorted parts from containers – known as bin picking – is one of the biggest challenges. Different shapes, layers and positions of the components make automated removal complex. However, modern robotics combined with 3D image processing and AI-supported gripping planning makes exactly that possible.
With the bin picking solutions on the RBTX marketplace from igus, you get cost-effective, ready-to-use systems that reliably master even complex picking scenarios – ideal for SMEs and industrial companies that want to make their processes more efficient.
3 things to consider when automating bin picking
Analyze part geometry and material properties
The shape, size, surface, and weight of the parts to be picked influence the choice of gripper and image processing. Shiny or transparent parts, for example, require special 3D cameras or light sources.
Select the appropriate 3D vision technology
Precise object recognition is crucial for reliable bin picking. This is where 3D cameras (e.g., time-of-flight, stereo cameras, or structured light) come into play, capturing the position and orientation of the parts in space.
Coordinating grippers and path planning
The gripper must not only grasp the part securely, but also avoid collisions with the container. Intelligent path planning ensures that the robot operates efficiently and safely – even in changing scenarios.
How to get started with your bin picking solution
Discover the key steps to automate bin picking tasks — from selecting the right components and 3D vision systems to configuring grippers and optimizing system setup for reliable performance
Define the application
Which parts need to be picked? How big is the container? What cycle time is required?
Select components
The RBTX marketplace offers robot arms, 3D cameras, grippers, and software solutions—all modularly combinable and coordinated with each other.
Test & validate
Use the RBTX “test before invest” service to have your application tested. This will give you a realistic assessment of feasibility and performance.
Integration & commissioning
Many systems are “plug & play” – with intuitive software, preconfigured interfaces, and support from igus and partners.
RBTXpert Conclusion
Bin picking is impressive—but it takes time to set up and optimize. You’ll need the right camera, lighting, gripper, and patience. Plan for setup time and budget. If you need a fast solution, consider pre-sorting. But if you're ready to invest, bin picking can save serious effort in the long run.

Advantages of the automated bin picking solutions
Automated bin picking increases speed, accuracy, and consistency while reducing labor costs, fatigue, and the risk of handling errors
24/7 operation possible
Robots work around the clock – without fatigue or errors.
Consistent quality
Every pick is perfect – regardless of daily form or experience.
Higher process speed
Automated picking speeds up downstream processes such as assembly, packaging, or sorting.
Reduction of waste and damage
Precise gripping movements minimize mispicks and component damage.
Relief for employees
No more monotonous, physically demanding work on the line.
Get started, find your solution now!

igus

Fairino

igus GmbH

Mech Mind

Variobotic
SCHUNK

Variobotic GmbH
PanAromaGmbH
FAQ
Frequently asked questions about bin picking with robots





